Installation¶
Arduino¶
Den ersten Arduino Nano an einen Computer anschließen und die Arduino IDE starten (falls diese noch nicht installiert ist, kann diese via https://www.arduino.cc/en/Main/Software heruntergeladen werden).
Nach dem Starten den Inhalt der Datei arduino-capacitance-meter/arduino-capacitance-meter.ino in die Arduino Software
einfügen.
Die IDE für den Arduino Nano einstellen
Arduino Nano: Tools -> Board -> Arduino Nano
Prozessor: Tools -> Processor -> ATmega328P (Old Bootloader)
Port: Tools -> Port -> /dev/cu.wchusbserial14130 (der Port kann von System zu System anders aussehen)
Nachdem die Einstellungen gesetzt wurden kann
Raspberry Pi¶
DHT22 Temperatur- & Luftfeuchtigkeitssensor am Raspberry Pi anschließen¶
GPIO - Layout¶
Die Dokumentation wurde für das Raspberry Pi Model B+ V1.2 erstellt. Wenn ein anderer Raspberry Pi verwendet wird,
kann es sein das, dass das GPIO Layout anders aussieht und der DHT22 Sensor an andere Pins angeschlossen werden muss.
Um das GPIO-Layout des Pi’s herauszufinden, kann das Projekt https://github.com/RPi-Distro/python-gpiozero
genutzt werden Abb. 21.
python-gpiozero installieren:
sudo apt install python3-gpiozero # install
pinout # run in cli
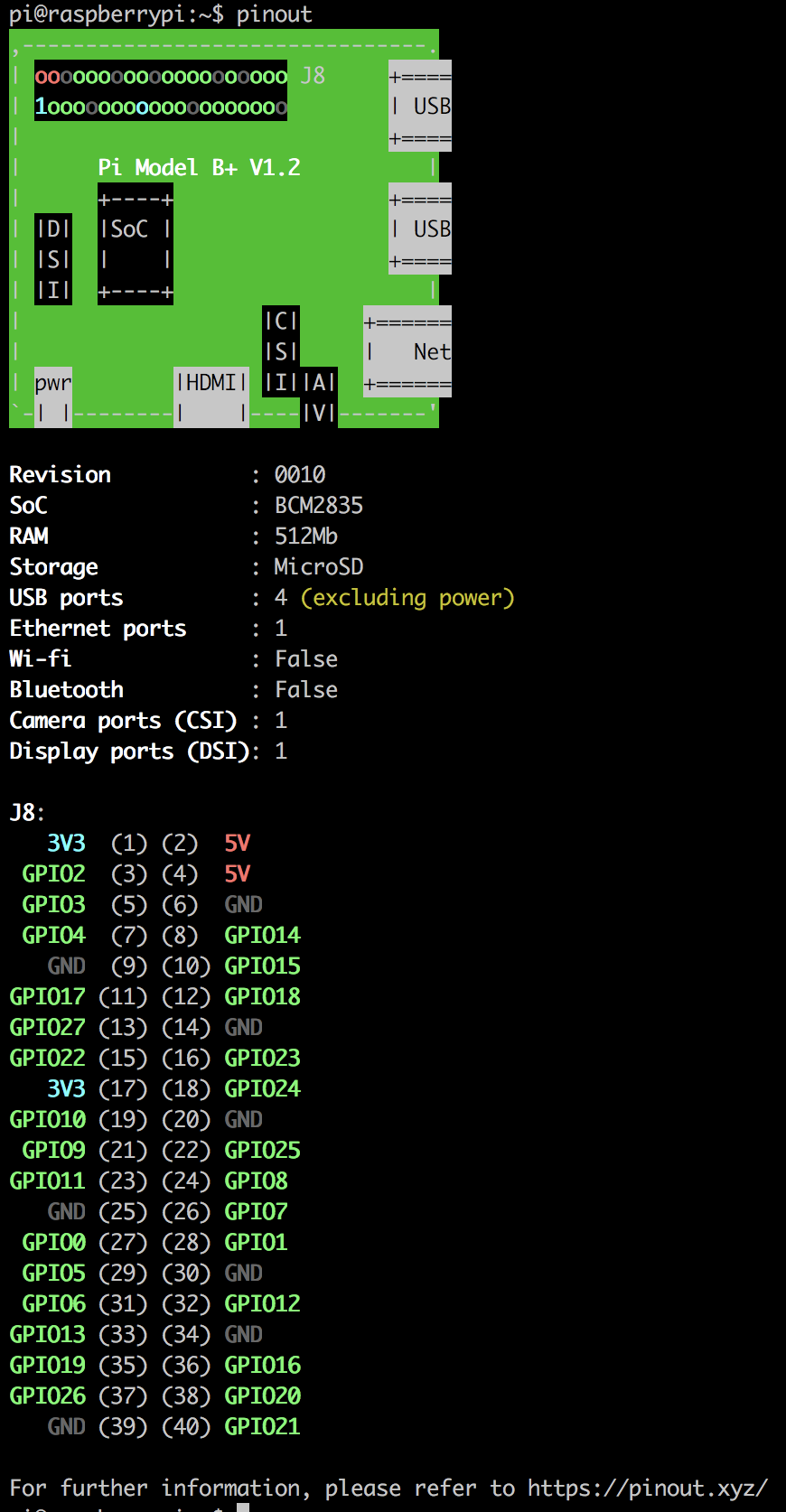
Abb. 21 Pinout
Beim Verwenden des Raspberry Pi Model B+ V1.2 Models, die gleichen Pins verwenden, wie im Bild
(Abb. 22) abgebildet.
Warnung
Bei dem DHT22 Temperatursensor und Luftfeuchtigkeitssensor im Bild handelt es sich um ein Modell, welches
mit Platine ausgeliefert wurde. Der Steckplan ohne Platine weicht von dieser Abbildung ab!
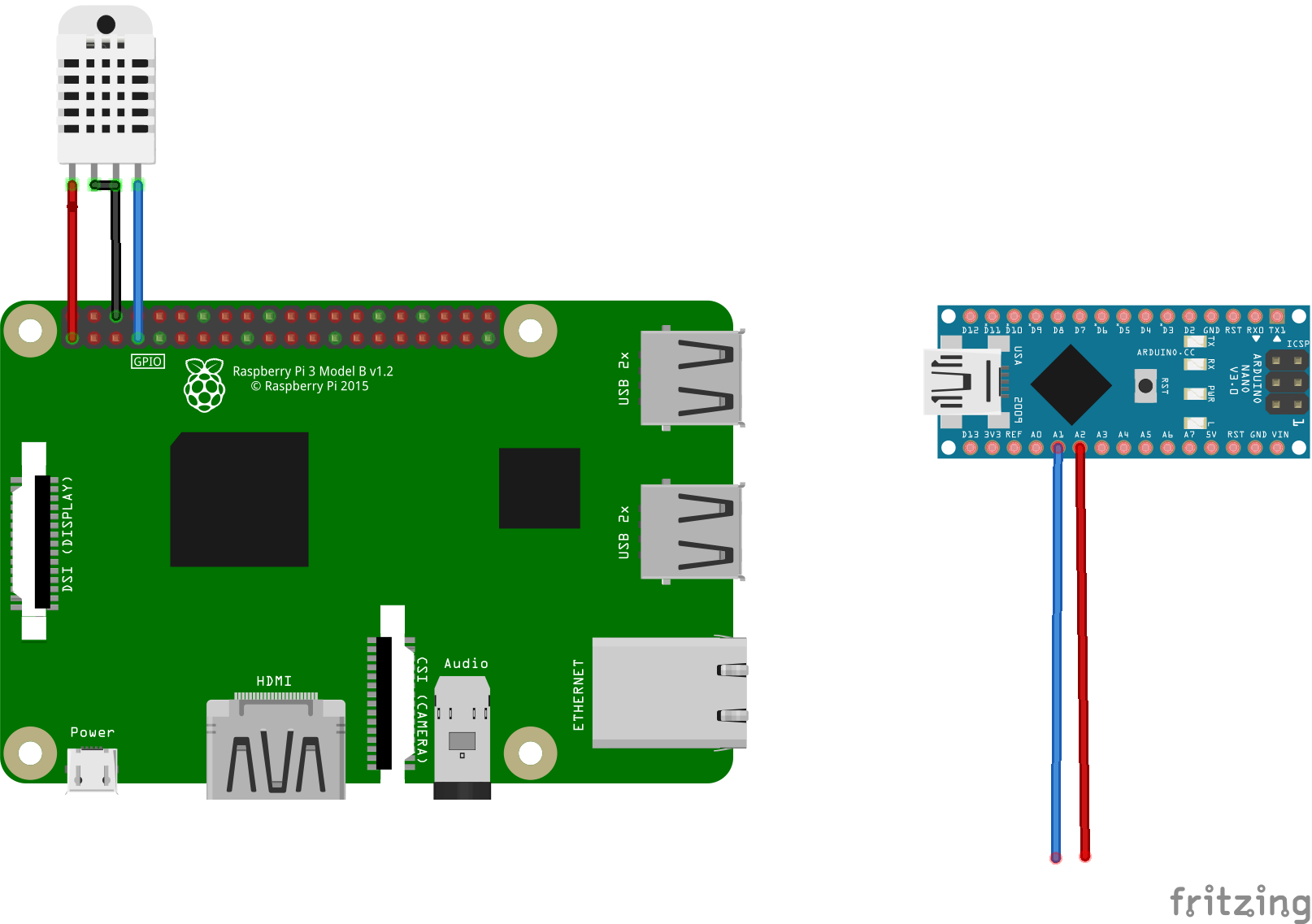
Abb. 22 Raspberry Pi Steckplan
DHT22 Temperatur- & Luftfeuchtigkeitssensor
+->3V3out->GPIO 7-->GND
Betriebsystem¶
Für dieses Projekt wird eine saubere Raspbian Installation vorausgesetzt, die aktuelle Version kann von der offiziellen Raspberry Pi Website heruntergeladen werden: https://www.raspberrypi.org/downloads/raspbian/
KellerBot Software¶
KellerSensorTelegramBot kann auf dem Raspberry Pi über pip installiert werden:
$ sudo pip3 install git+git://github.com/adafruit/Adafruit_Python_DHT.git
$ sudo python3 -m pip install git+git://github.com/linuxluigi/kellerbot.git
Dieser Befehl lädt das Archiv und deren Abhänigkeiten aus dem Internet herunter und installiert diese.
Falls der Tarball heruntergeladen wurde, diesen entpacken und ausführen:
$ sudo pip3 install git+git://github.com/adafruit/Adafruit_Python_DHT.git
$ sudo python3 setup.py install
Nach der Installation des Pakets muss der Service geladen werden. Die Telegram Bot ID & Telegram Chat ID (für die Telegram ID’s siehe die Kaptiel 5. Chat Group ID erhalten & 2. Eigenen Bot erstellen) in der service konfig Datei eintragen und anschließend den Service neuladen. Automatisches Starten während des Bootvorgangs aktivieren und den Service ausführen:
$ sudo systemctl daemon-reload
$ sudo systemctl edit keller.service
[Service]
Environment="BOT_ID=XXX"
Environment="CHAT_ID=XXX"
$ sudo systemctl daemon-reload
$ sudo systemctl enable keller.service
$ sudo systemctl start keller.service
$ sudo systemctl status keller.service
Keller Hardware Installation¶
Als erstes die Arduinos via USB an den Raspberry Pi anschließen, dann den Pi mit einem WLAN Stick oder via WLAN to Lan Bridge an das WLAN Netzwerk anschließen und alles mit Strom versorgen, wie in Abb. 23 dargestellt.

Abb. 23 Projekt Hardware Installation
Die Kabel, die zur Messung dienen sollen, an einem Ende mit einem weiblichen Verbindungsstecker versehen und an die Pins
A2 & A1 des jeweiligen Arduinos anstecken, wie in Abb. 24 zu sehen.
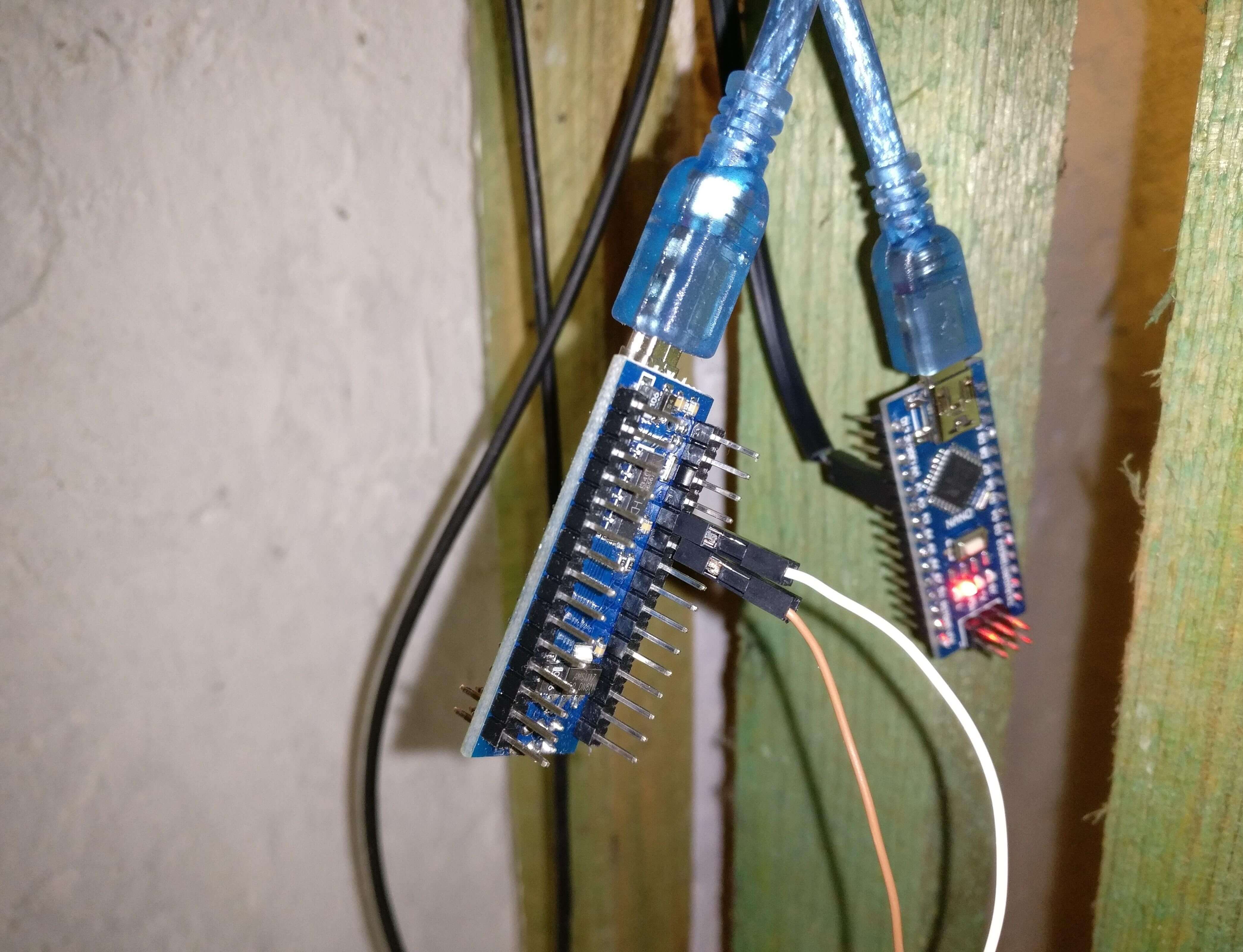
Abb. 24 Arduino Kabelanschluss
Im letzten Schritt die Kabel, die an die Arduinos angeschlossen wurden, im Keller verlegen. Mindestens das Ende muss am Boden liegen, um effektiv den Zustand messen zu können, wie in Abb. 25 und Abb. 26 zu sehen.

Abb. 25 Messkabel verlegen an der Decke

Abb. 26 Messkabelende verlegen